
Symet
The Symet use one of the simplest BEAM circuits. The solar cell charges the capacitors (one or more in parallel). A solar engine circuit monitors the voltage, and when it trips power is dumped through the motor. Symets rest on their motor spindle, and scoot long the ground when the motor spins. When they hit something, they tilt onto another axis, and go off in a different direction.
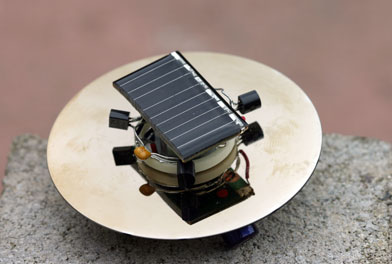

This is one of the first free-formed BEAM bots that I built. The circuit is a 1381-based solar engine circuit, and is built around the motor, with components placed radially around a central axis. I used a platter from a laptop hard drive as the bumper.
The trick with symets is to get the angle relative to the ground and the spindle ground contact right so that the symet moves in a straight line until it hits something. I failed with this one, but it jiggers around in circles quite happily. I also learnt that hot-glue solidifies instantly when it comes into contact with cold metal. Either use the tip of the hot glue gun to heat the metal before glueing, or use epoxy.